硬件标准化与系统设计
前言
硬件标准化与系统设计包括硬件标准化概述和基于硬件标准化的系统设计两个部分,第一部分针对硬件标准化是什么,为什么要做硬件标准化,以及如何实现硬件标准化三个方面进行阐述;第二部分讲述硬件标准化体系,并以实际兵种案例说明如何利用硬件标准化优势简化系统设计,提高系统稳定性。
Part 1:硬件标准化概述
硬件标准化定位
硬件标准化,是为了解决机器人队硬件迭代和技术传承问题而提出的解决方案。硬件迭代问题源于两个方面,一是机器人迭代,二是比赛规则更变,两方面的本质都指向同一点:硬件需求更变。硬件需求更变最有可能且最直接的体现是硬件接口更变。硬件接口更变,包括接口种类,引脚数和数量的更变,在导致前一代电路板被废弃的同时耗费了时间成本。技术传承问题,是指经过信号完整性和电源完整性分析之后针对PCB layout进行的优化,因为硬件迭代问题,难以延用到下一赛季,后继者无法将设计案例快速转化为解决方案予以应用。
机器人通用的硬件方案,是硬件标准化最直观的理解。主控板+扩展板的模式,既能通过管脚复用改变接口定义,实现接口复用,提高硬件方案通用性,又能通过不同扩展板与主控板的组合,为快速构建硬件方案提供了可能性。
硬件标准化的核心思路是以统一接口为基础,以模块化的方法,实现硬件标准化。通过定义硬件接口功能、线序等属性,将所需外设模块从主控板中分离并设计为扩展板,提取主控板核心功能,简化主控板设计,降低外设与主控的耦合度,从而最大限度避免不必要的硬件迭代,同时后续改进工作可基于标准化的主控板进行,硬件迭代和技术传承问题迎刃而解。
硬件系统稳定性
提高硬件系统稳定性,是硬件标准化一个重要研发目的。硬件系统稳定性包括两方面,板级稳定性和连接稳定性。
板级稳定性从PCB元器件、layout角度考虑,PCB元器件角度体现在耐压是否足够、阻值容值等参数是否合适,以及是否具有针对集成电路的AEC-Q100认证,针对分立半导体器件的AEC-Q101认证,针对无源器件的AEC-Q200认证。机器人的工作环境与汽车相似,选择汽车级认证器件是提高稳定性的有效措施。
| AEC-Q100 | AEC-Q101 | AEC-Q102 | AEC-Q104 | AEC-Q200 |
|---|---|---|---|---|
| Failure Mechanism Based Stress Test Qualification for Integrated Circuit | Failure Mechanism Based Stress Test Qualification for Discrete Semiconductors In Automotive Applications | Failure Mechanism Based Stress Test Qualification for Discrete Optoelectronic Semiconductors In Automotive Applications | Failure Mechanism Based Stress Test Qualification for Multichip Modules(MCM) In Automotive Applications | Failure Mechanism Based Stress Test Qualification for Passive Components |
| 集成电路 基于失效机理的应力测试验证 | 分立半导体器件 基于失效机理的应力测试验证 | 分立光电半导体器件 基于失效机理的应力测试验证 | 多芯片组件 基于失效机理的应力测试验证 | 被动元件 基于失效机理的应力测试验证 |
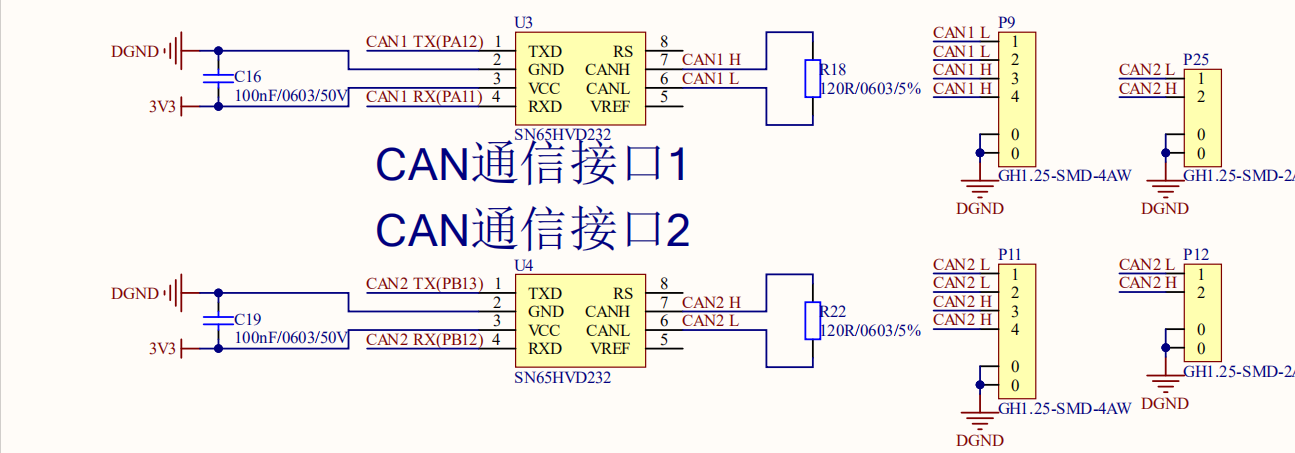
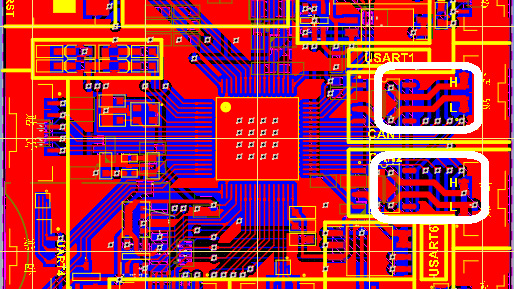
PCB layout角度体现在EMC设计(ElectroMagnetic Compatibility,电磁兼容性),信号线与电源走线规则。最重要的通信网络——CAN(Controller Area Network,控制器局域网络),要求差分走线,在PCB上需要遵守等长等距的规则。【CAN总线ISO标准:ISO11898,ISO11519-2】
| 
|
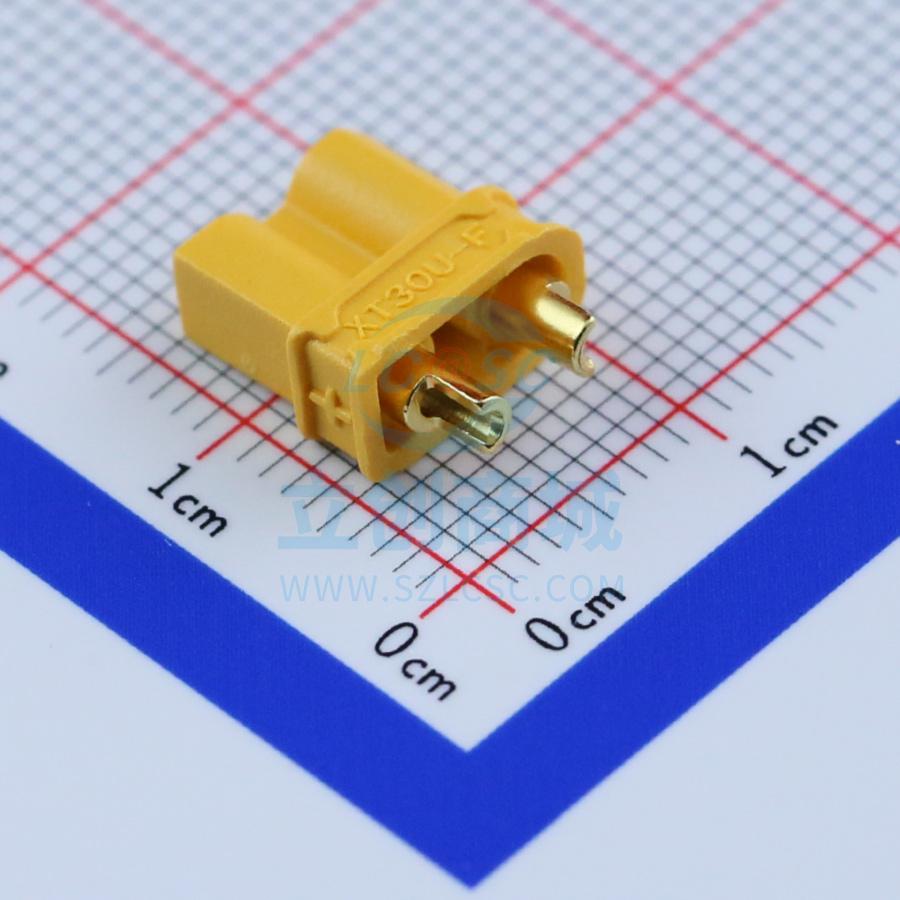
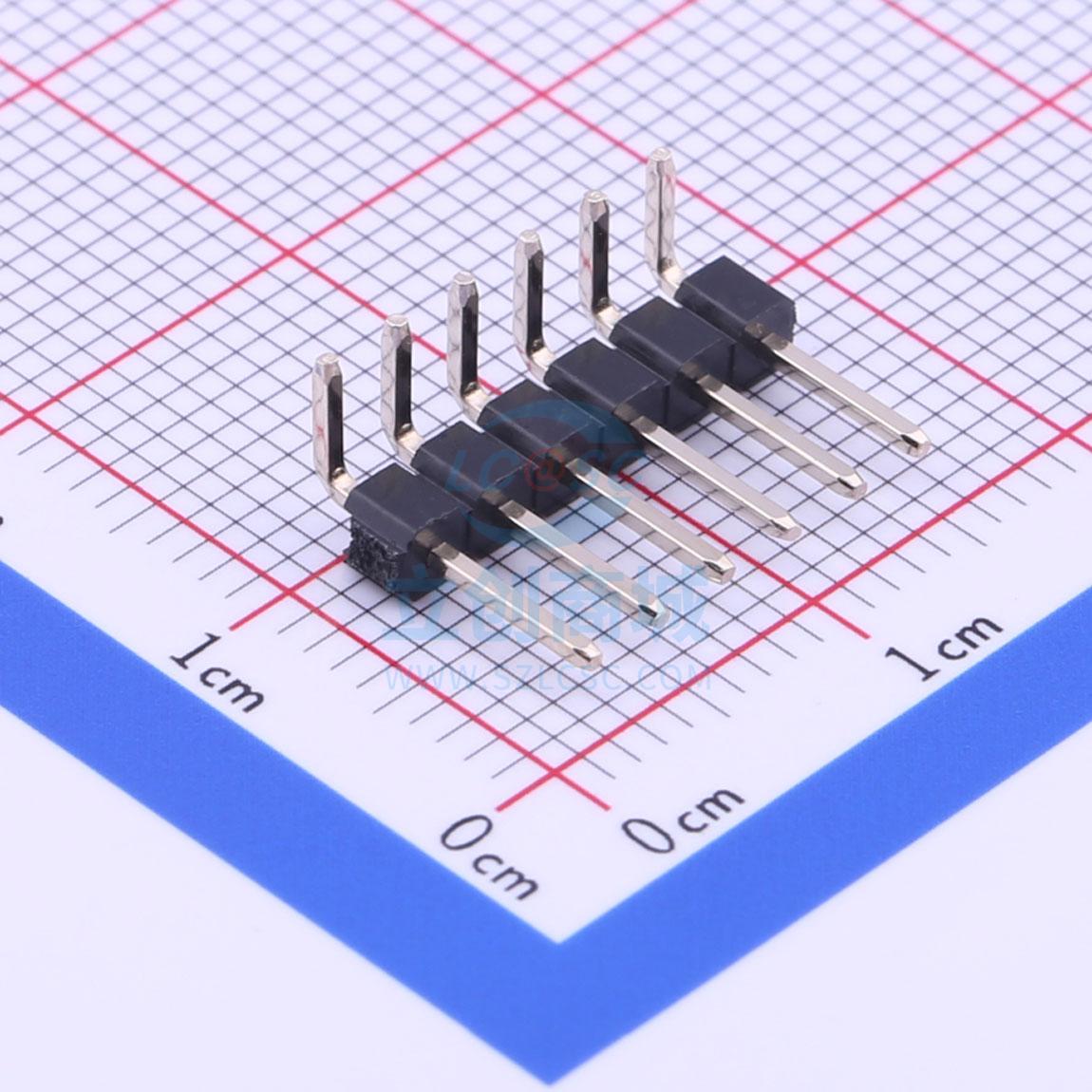
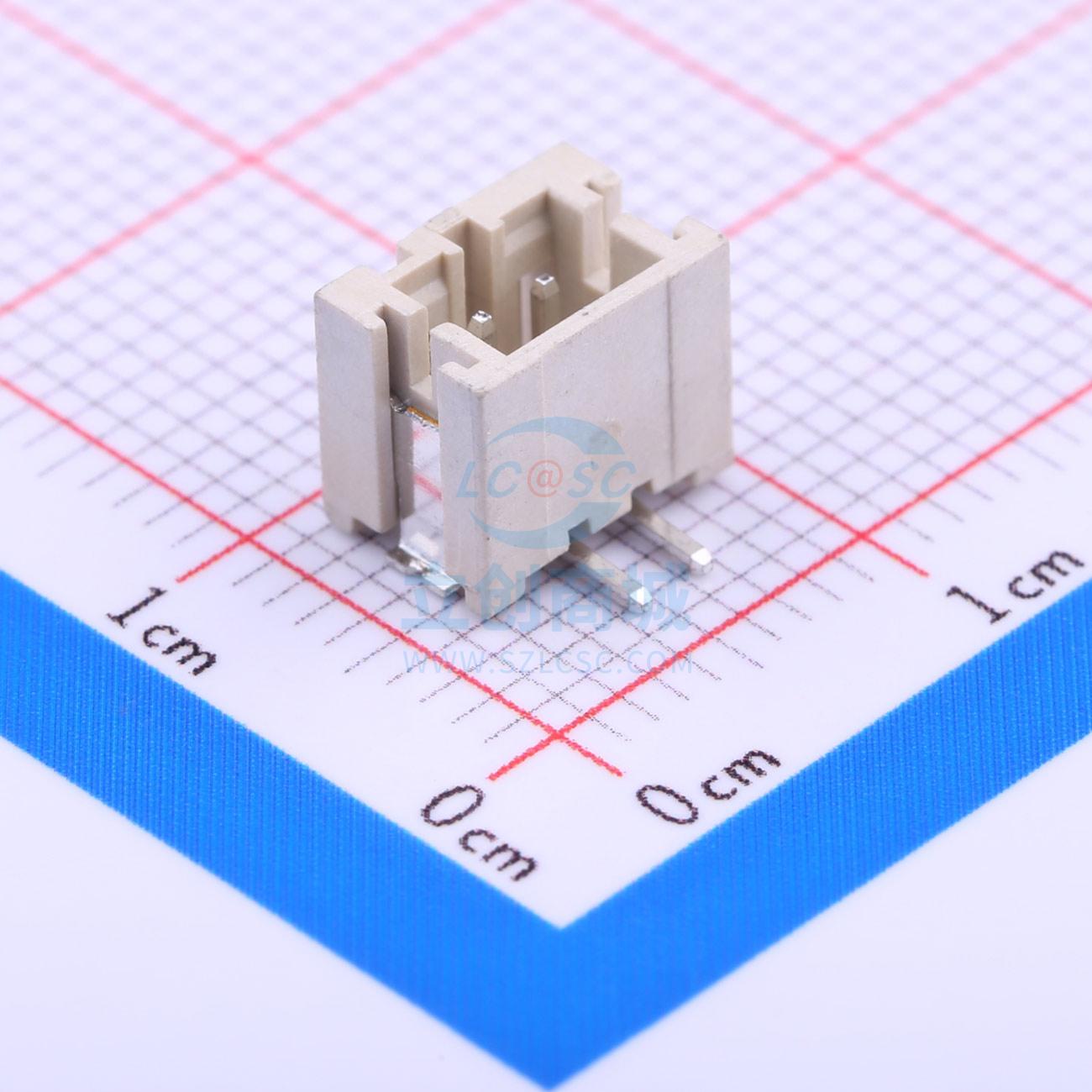
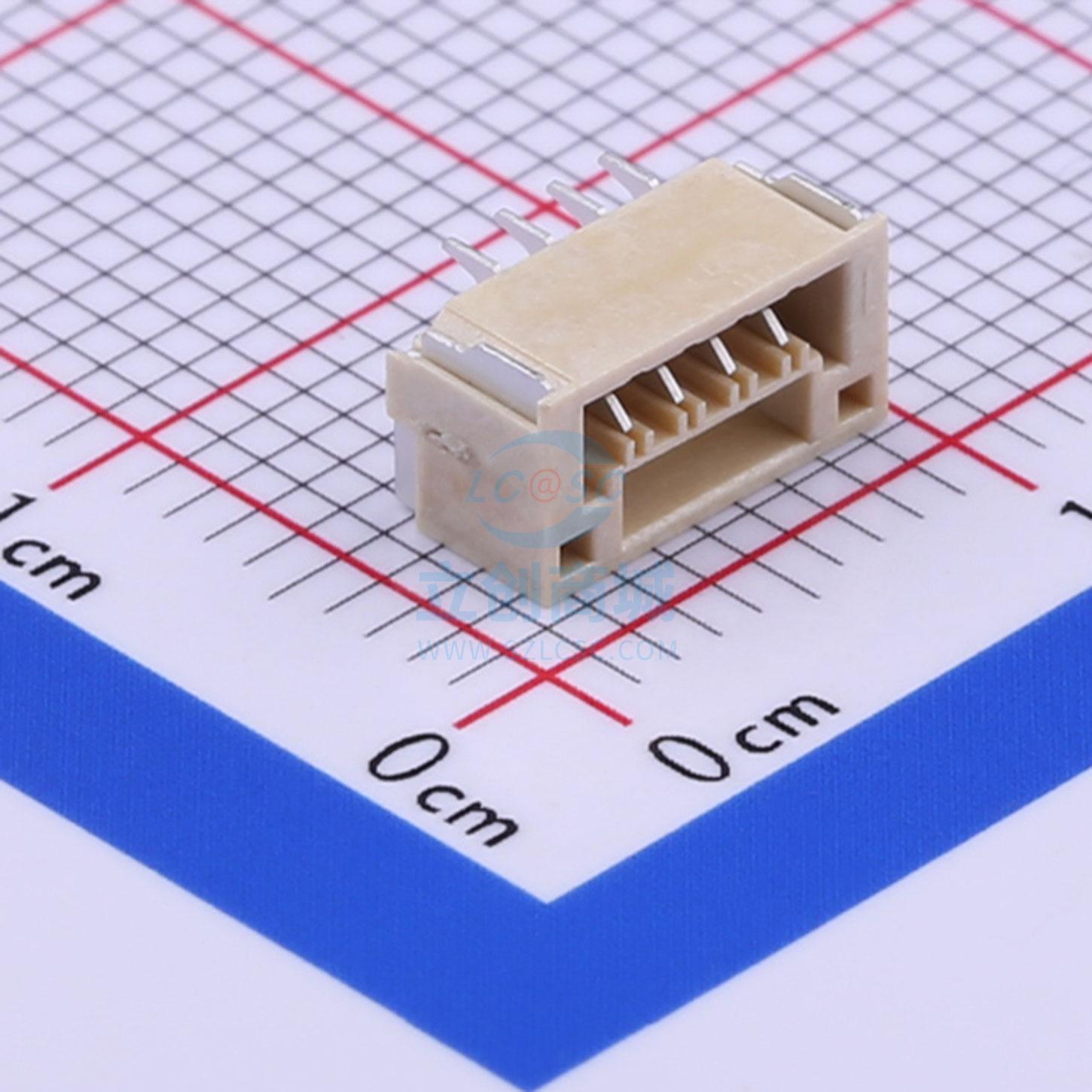
连接稳定性,指的是电路板与电路板之间、电路板与被控组件之间,不会在机器人实现功能过程中出现连接松动、接触不良等问题。电控组常用的接口有4种,XT30、排针、PH2.0、GH1.25。其中,XT30应用于大电流场景,排针通用性最佳,常用于开发板原型开发和调试接口,但是存在连接不稳定的致命隐患。对于信号传输,GH1.25稳定性最高,综上考虑,硬件标准化的切入口——接口类型定义选择了GH1.25。
| XT30 | 排针 | PH2.0 | GH1.25 | |
|---|---|---|---|---|
| 稳定性 | 高 | 低 | 中 | 高 |
| 载流量 | 30A | 3A | 2A | 1A |
| 应用 | 大电流场景 | 频繁拔插场景 | 信号传输/小电流场景 | 信号传输/小电流场景 |
 |
 |
 |
 |
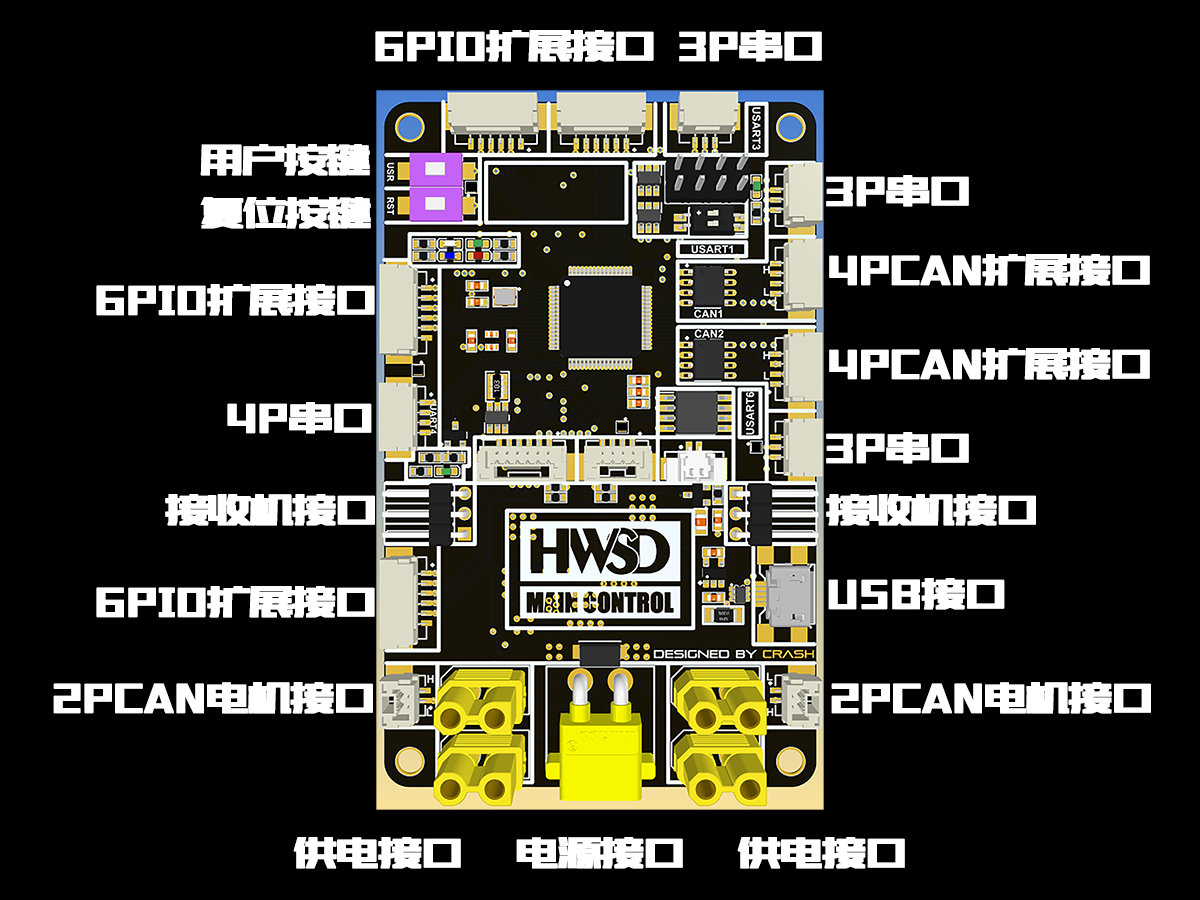
标准化接口定义
基于连接稳定性的分析,硬件接口的最佳选择是GH1.25;而实现接口复用的必要条件,是接口的引脚(Pin)数量相同且线序一致。在实际测试过程中得出的结论是:6Pin的IO扩展接口和4Pin的CAN扩展接口,最切合目前搭建的机器人系统。标准化接口定义如下表所示:
| 接口\线序 | 1 | 2 | 3 | 4 | 5 | 6 | 数量 |
|---|---|---|---|---|---|---|---|
| 6Pin IO扩展接口 | 5V | IO1 | IO2 | IO3 | IO4 | GND | 4 |
| 4Pin CAN扩展接口 | L | L | H | H | 2 | ||
| 4Pin SWD调试接口 | CLK | DIO | GND | 3V3 | 1 | ||
| 4Pin 串行通信接口 | 5V | TX | RX | GND | 2 | ||
| 3Pin 串行通信接口 | TX | RX | GND | 3 | |||
| 3Pin 舵机接口 | PWM | 5V | GND | 1 | |||
| 2Pin CAN电机接口 | L | H | 2 |
Part 2:基于硬件标准化的系统设计
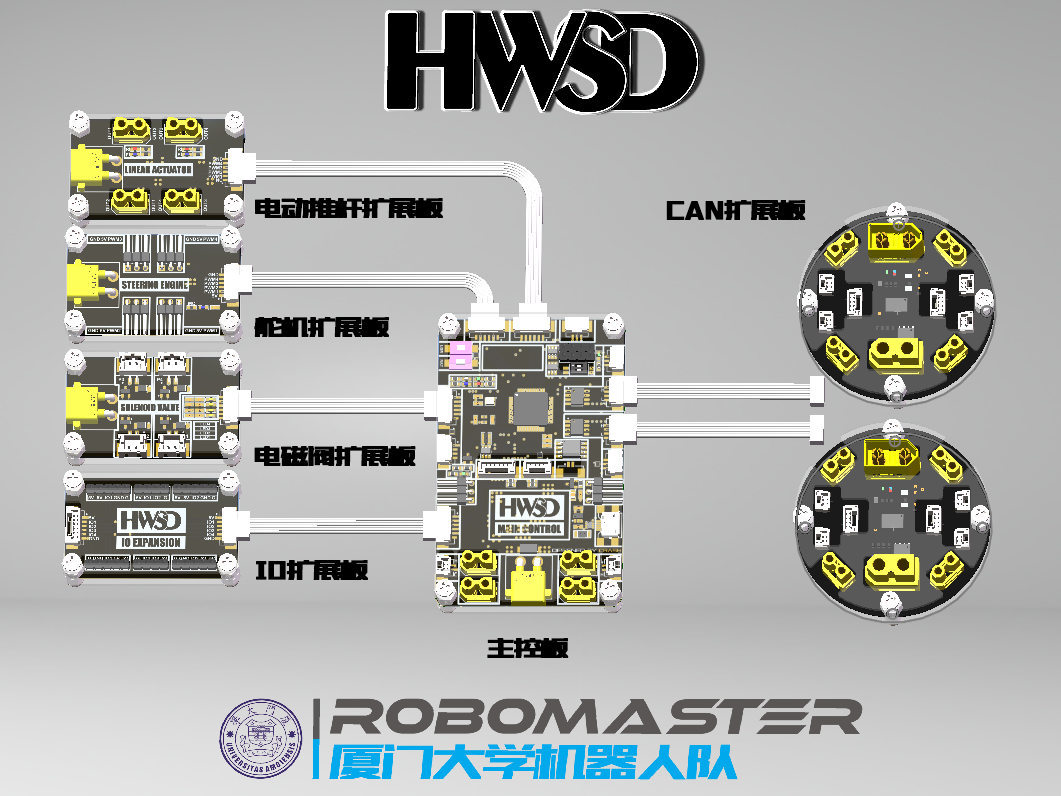
硬件标准化体系
硬件标准化体系由主控板和扩展板构成。目前完成的6种标准化电路板如下表所示:
| Main Control | CAN Station | IO Expansion | Steering Engine | Solenoid Valve | Linear Actuator |
|---|---|---|---|---|---|
| 主控板 | CAN扩展板 | IO扩展板 | 舵机扩展板 | 电磁阀扩展板 | 电动推杆扩展板 |
硬件设计流程
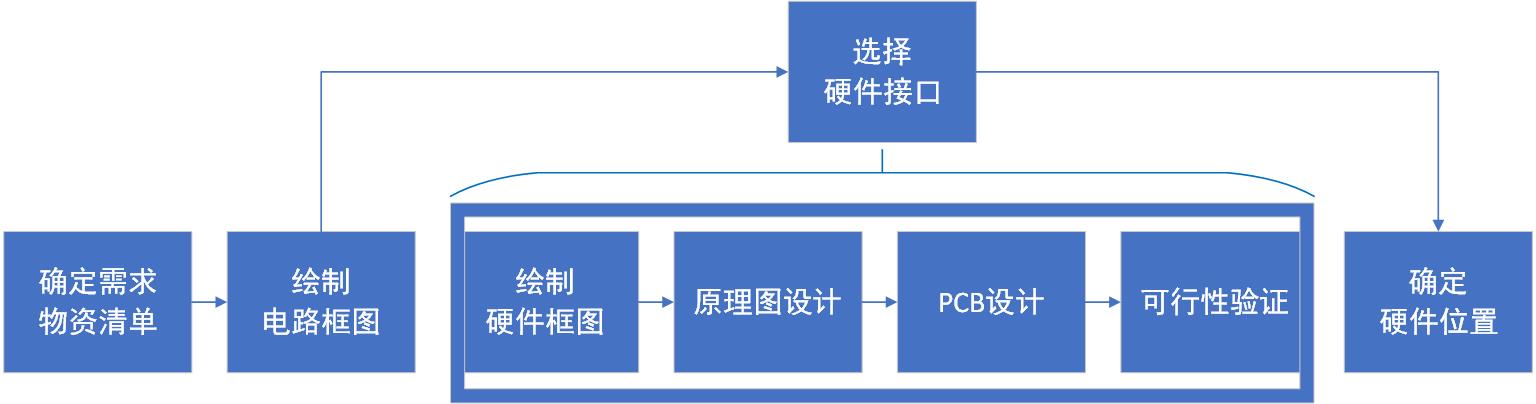
常规硬件设计流程如下图所示:

硬件标准化将硬件框图绘制、原理图设计、PCB设计、可行性验证四个步骤抽象并简化为选择硬件接口。这个概念和嵌入式的代码封装有异曲同工之处。
系统设计案例
接下以RM2020哨兵为例,简析如何基于硬件标准化构建系统方案。
- 确定需求和物资清单
| 结构 | 物资 | 数量 | 物资 | 数量 |
|---|---|---|---|---|
| 底盘 | 3508电机 | 2 | C620电调 | 2 |
| 主控板 | 1 | CAN扩展板 | 3 | |
| NUC | 1 | 24V转19V降压模块 | 1 | |
| 24V电池 | 1 | |||
| 云台 | 3508电机 | 4 | C620电调 | 4 |
| 2006电机 | 2 | C610电调 | 2 | |
| 6020电机 | 4 | 激光 | 2 | |
| 摄像头 | 2 |
| 物资清单 | 物资 | 数量 | 物资 | 数量 |
|---|---|---|---|---|
| 电机类 | 3508电机 | 6 | C620电调 | 6 |
| 2006电机 | 2 | C610电调 | 2 | |
| 6020电机 | 4 | |||
| PCB类 | 主控板 | 1 | CAN扩展板 | 3 |
| 电源类 | 24V电池 | 1 | 24V转19V降压模块 | 1 |
| 视觉类 | NUC | 1 | 摄像头 | 2 |
| 激光 | 2 |
哨兵总共需要12个电机,没有其他执行器,只需要1 * 主控板 + 3 * CAN扩展板即可实现基本功能。
- 绘制电路框图
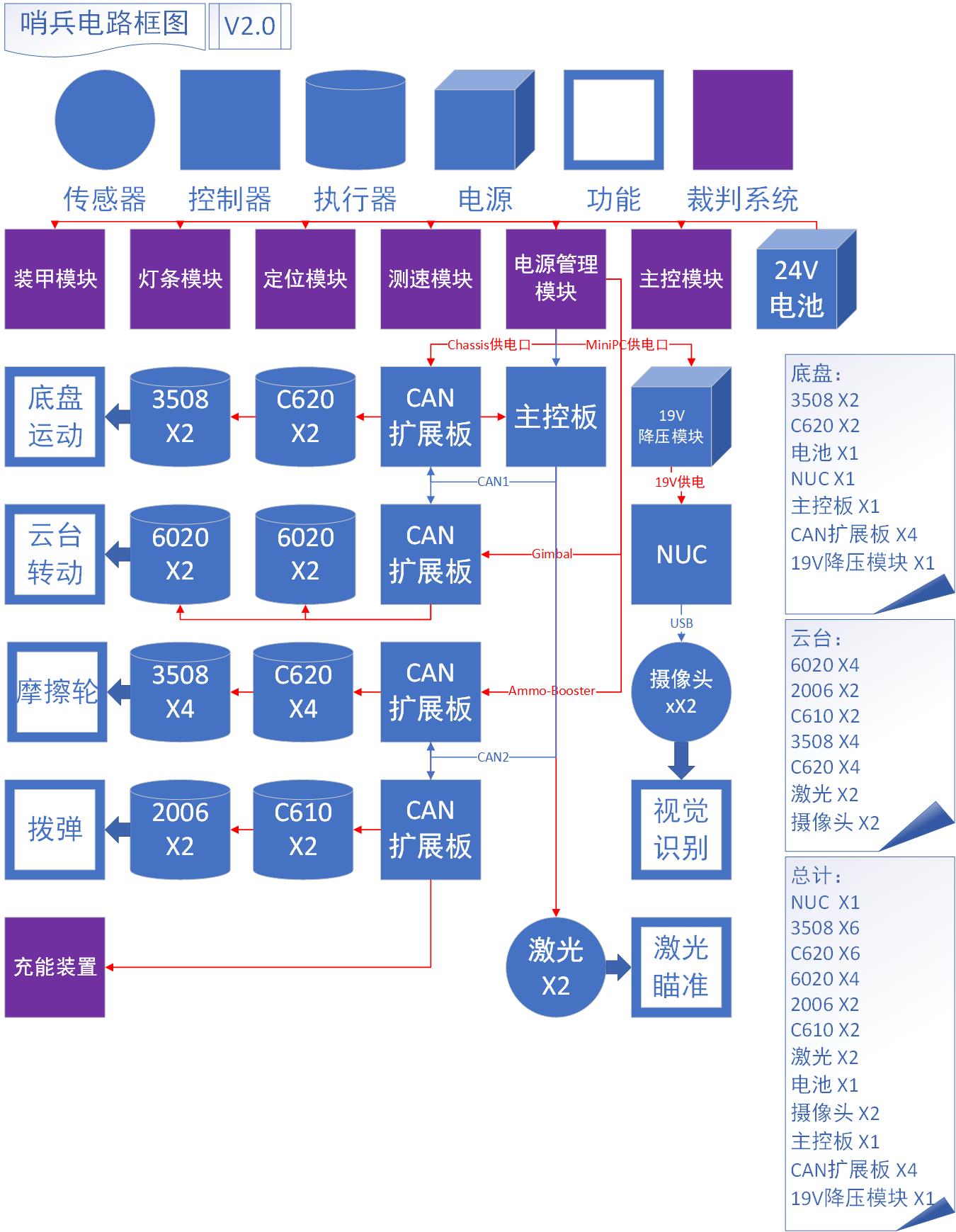
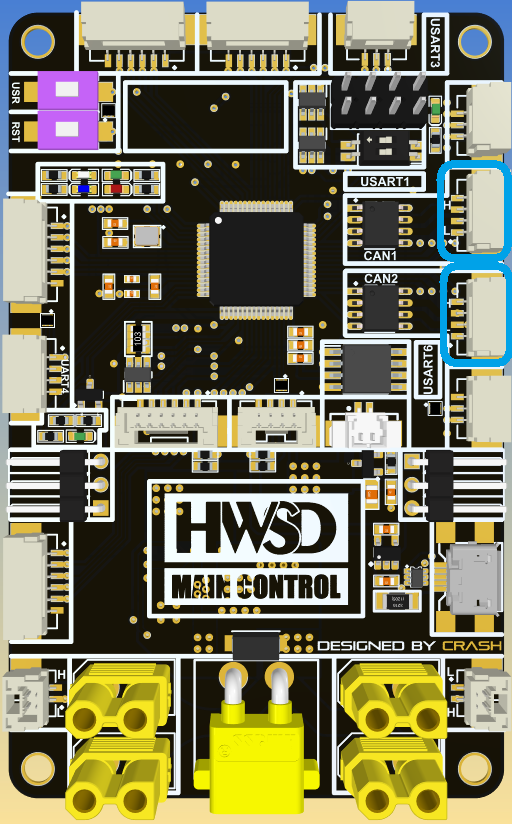
- 选择硬件接口
由于哨兵的执行器全部是CAN通信,因此只需要连接CAN1和CAN2两个扩展接口。
由于RM2020哨兵只使用了CAN电机的特殊性,此部分再以RM2019工程为例进行展开
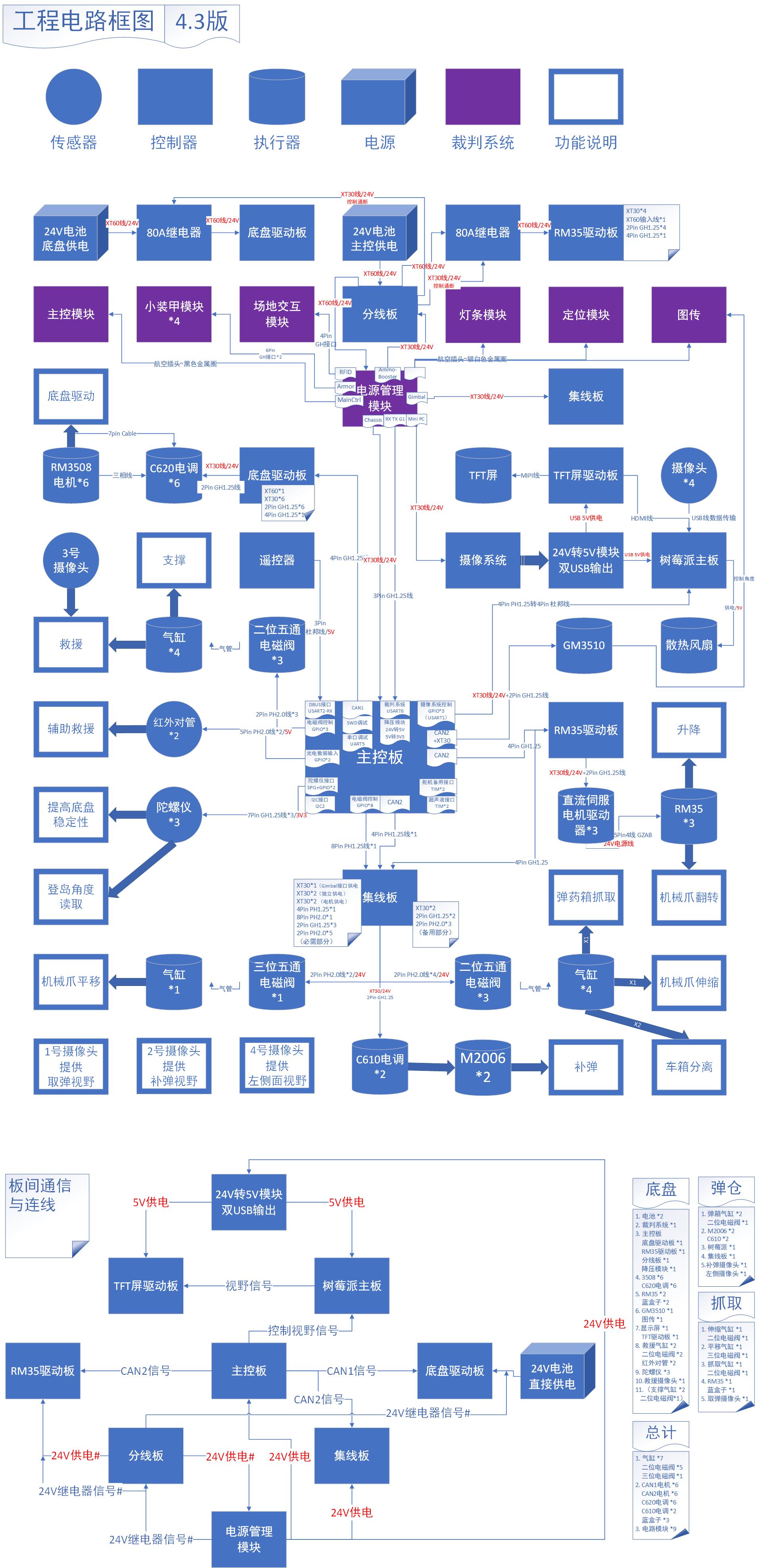
从RM2019工程电路框图中提取出的硬件需求:
| 二位电磁阀 | 5 | 三位电磁阀 | 1 | 所需IO | 7 |
|---|---|---|---|---|---|
| CAN1电机 | 6 | CAN2电机 | 6 | 所需电机接口 | 12 |
| 红外对管 | 2 | 所需IO | 2 | ||
| 树莓派通信 | 1 | 所需串口 | 1 |
转化为硬件标准化方案:
| 主控板 | CAN扩展板 | 电磁阀扩展板 | IO扩展板 | |
|---|---|---|---|---|
| 数量 | 1 | 3 | 2 | 1 |
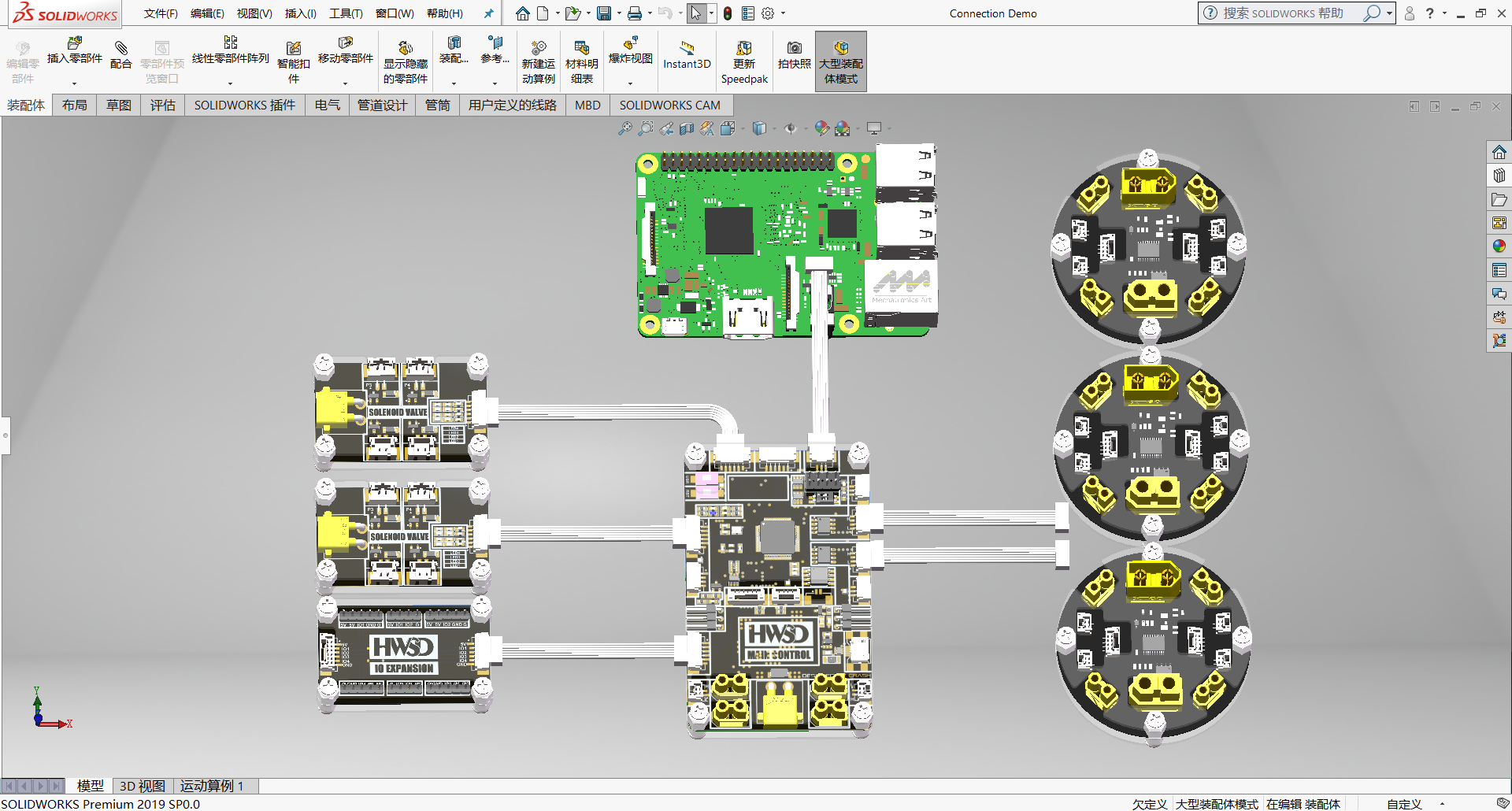
工程硬件系统连接Demo:
- 确定硬件位置
硬件标准化对板子的外形进行了定义:
| 主控板 | 扩展板 | CAN Station | |
|---|---|---|---|
| 长 | 85.60mm | 50.00mm | 直径 56.60mm |
| 宽 | 53.98mm | 30.00mm |
据此,电控组可根据结合图纸确定硬件位置,哨兵示例如图:
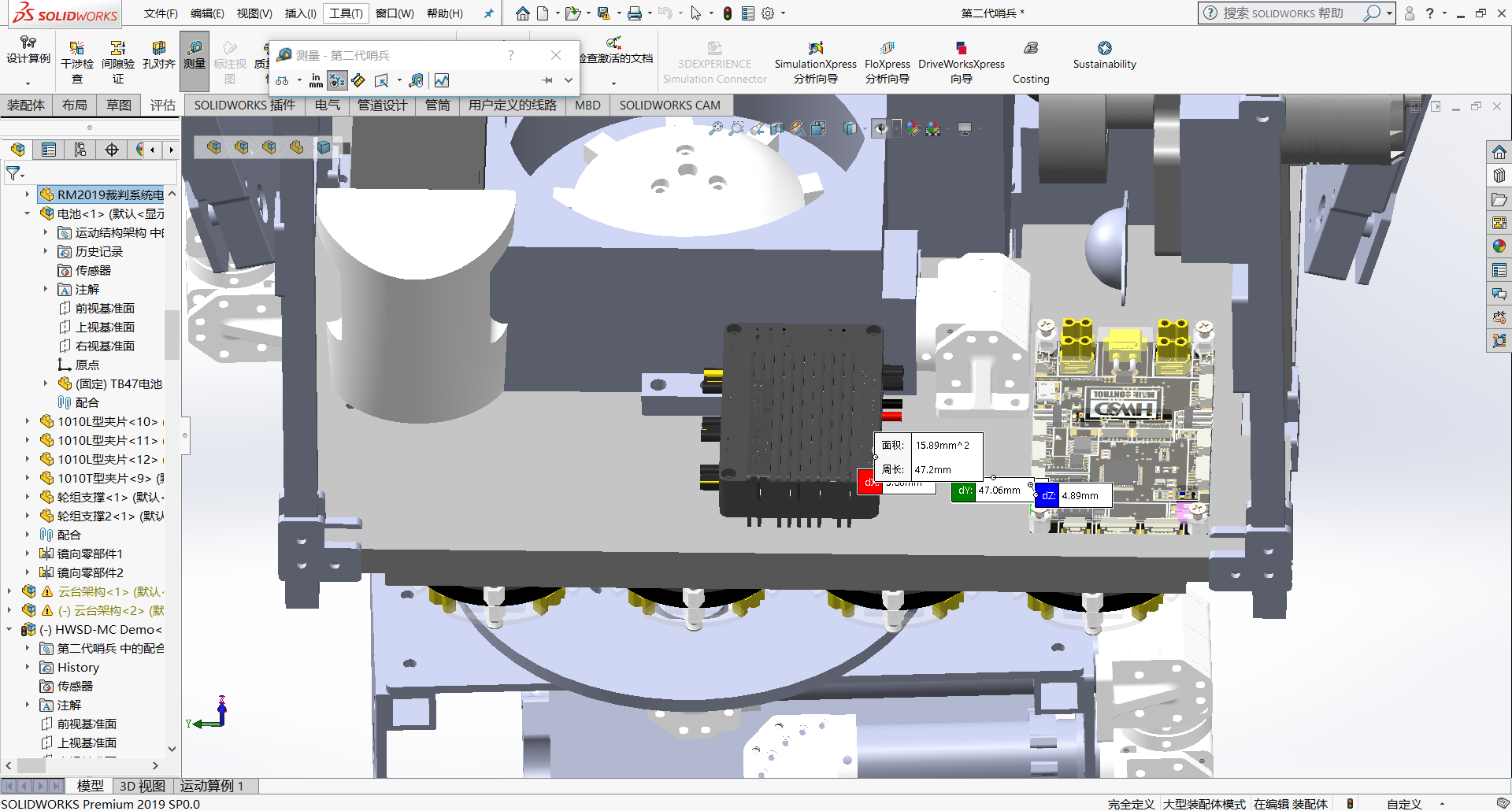
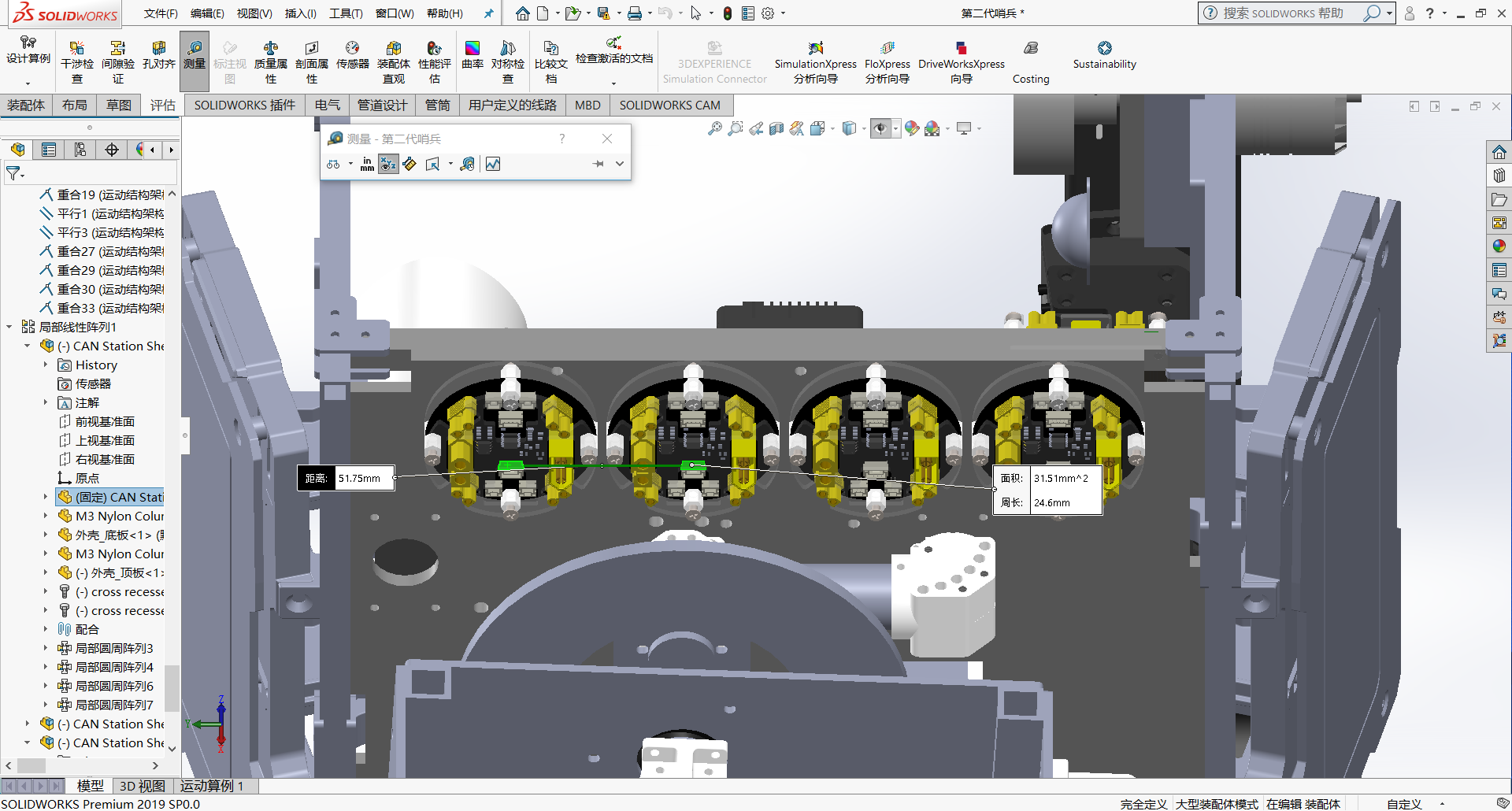
硬件位置确定后,即可评估走线长度,进行布线优化。标准化接口定义了Pin数,使得对应连接线能够批量定制,一方面有效降低连接线定制成本,另一方面相比于自制连接线的连接稳定性有很好的提升。
至此,一个基于硬件标准化的硬件系统搭建完毕。
作者:罗上聪
