YOLOv3从理论到实践
YOLOv1 (2015)
YOLO v1创造性地使用一阶结构完成了物体检测任务,直接预测物体的类别与位置,没有RPN网络,也没有类似于Anchor的预选框,因此速度很快。
网络结构
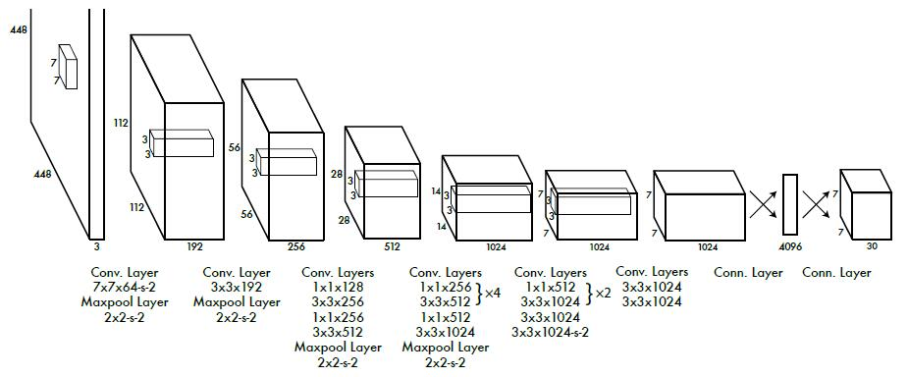
- 在3*3的卷积后通常连接一个通道数更低的1*1卷积,这种方式既降低了计算量,同时也提升了模型的非线性能力。(用1×1 reduction layers 紧跟 3×3 convolutional layers 取代Goolenet的 inception modules )
- 除了最后一层使用了线性激活函数外,其余层激活函数为Leaky ReLU。 $$ \left{ \begin{aligned} &x_i & if\ x_1\ge 0;\ &\frac{x_i}{a_i} &if\ x_i<0. \end{aligned} \right. $$
- 在训练中使用了Dropout与数据增强的方法防止过拟合。
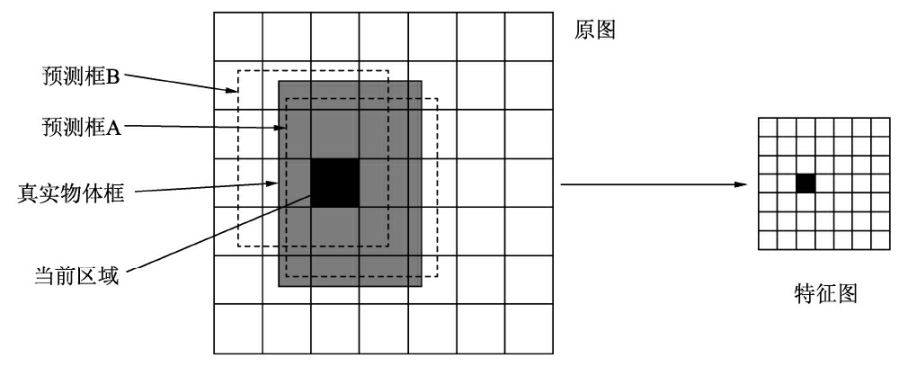
特征图处理
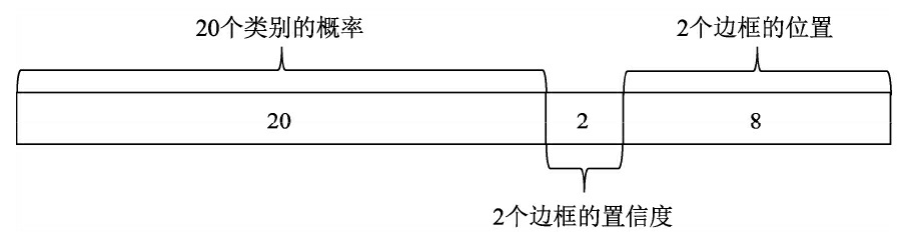
损失计算
- 当一个真实物体的中心点落在了某个区域内时,该区域就负责检测该物体。具体做法是将与该真实物体有最大IoU的边框设为正样本,这个区域的类别真值为该真实物体的类别,该边框的置信度真值为1。
- 除了上述被赋予正样本的边框,其余边框都为负样本。负样本没有类别损失与边框位置损失,只有置信度损失,其真值为0。
损失函数: $$ \begin{aligned} Loss &=\lambda_{coord}\sum_{i=0}^{s^2}\sum_{j=0}^B\mathbb{1}{ij}^{obj}\left[(x_i-\hat{x_i})^2+(y_i-\hat{y_i})^2\right]\ &+\lambda{coord}\sum_{i=0}^{s^2}\sum_{j=0}^B\mathbb{1}{ij}^{obj}\left[\left(\sqrt{w_i}-\sqrt{\hat{w}_i}\right)^2+\left(\sqrt{h_i}-\sqrt{\hat{h}_i}\right)^2\right]\ &+\sum{i=0}^{s^2}\sum_{j=0}^B\mathbb{1}{ij}^{obj}(C_i-\hat{C}_i)^2\ &+\lambda{noobj}\sum_{i=0}^{s^2}\sum_{j=0}^B\mathbb{1}{ij}^{noobj}(C_i-\hat{C}_i)^2\ &+\sum{i=0}^{s^2}\mathbb{1}{ij}^{obj}\sum{c\in classes}\left(p_i(c)-\hat{p}_i(c)\right)^2 \end{aligned} $$
- 第一项为正样本中心点坐标的损失。λcoord的目的是为了调节位置损失的权重,YOLO v1设置$λ_{coord}$为5,调高了位置损失的权重。
- 第二项为正样本宽高的损失。由于宽高差值受物体尺度的影响,因此这里先对宽高进行了平方根处理,在一定程度上降低对尺度的敏感,强化了小物体的损失权重。
- 第三、四项分别为正样本与负样本的置信度损失,正样本置信度真值为1,负样本置信度为0。$λ_{noobj}$默认为0.5,目的是调低负样本置信度损失的权重。
- 最后一项为正样本的类别损失。
YOLOv2 (2016)
针对YOLO v1的不足,2016年诞生了YOLO v2。相比起第一个版本,YOLO v2预测更加精准(Better)、速度更快(Faster)、识别的物体类别也更多(Stronger)。
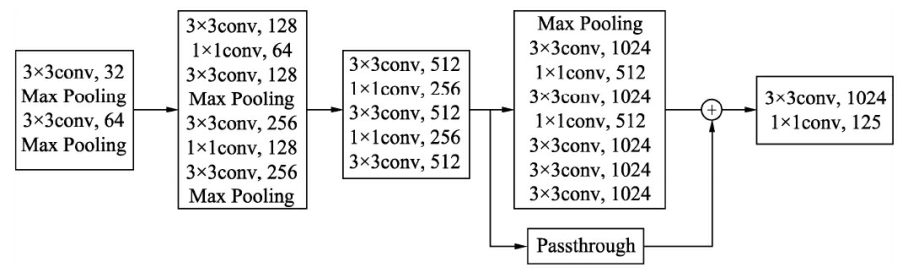
网络结构改进
使用DarkNet,精度与VGG相当,而浮点运算仅为VGG的1/5,因此速度极快。
先验框设计
聚类提取先验框尺度
Faster RCNN中预选框(即Anchor)的大小与宽高是由人手工设计的,因此很难确定设计出的一组预选框是最贴合数据集的,也就有可能为模型性能带来负面影响。
针对此问题,YOLO v2通过在训练集上聚类来获得预选框,只需要设定预选框的数量k,就可以利用聚类算法得到最适合的k个框。在聚类时,两个边框之间的距离使用如下计算方法,即IoU越大,边框距离越近。 $$ d(box,centroid)=1-IoU(box,centroid) $$
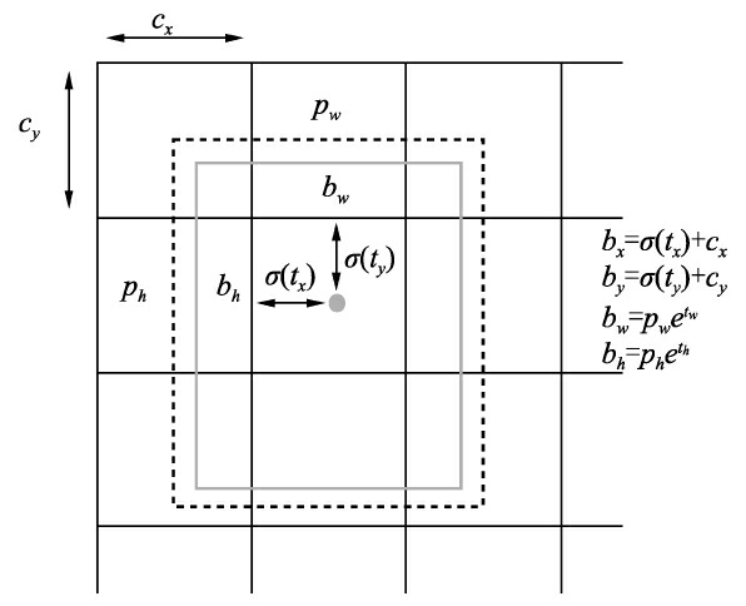
优化偏移公式
由于设计了先验框,因此设计预测先验框与真实物体的偏移量。在Faster RCNN中,中心坐标偏移公式为: $$ \left{ \begin{aligned} x &= (t_x\times w_a)+x_a\ y &= (t_y\times h_a)+y_a \end{aligned} \right. $$
YOLOv2认为这种预测方法没有对预测偏移进行限制,导致预测的边框中心可以出现在图像的任何位置,尤其是在训练初始阶段,模型参数还相对不确定。
因此YOLOv2提出了下面的预测公式: $$ \left{ \begin{aligned} b_x &= \sigma(t_x)+c_x\ b_y &= \sigma(t_y)+c_y\ b_w &= p_we^{t_w}\ b_h &= p_he^{t_h}\ p_r&(object)\times IoU(b,object)=\sigma(t_0) \end{aligned} \right. $$
损失函数
通过IoU设定决策阈值,以区分正、负样本,下面为带有先验框的损失函数: $$ \begin{aligned} Loss_t &= \sum_{i=0}^W\sum_{j=0}^H\sum_{k=0}^A(1_{\max{IoU}<Thresh}\times\lambda_{noobj}\times(-b^o_{ijk})^2\ &+1_{t<12800}\times \lambda_{prior}\times\sum_{r\in(x,y,w,h)}(prior^r_k-b^r_{ijk})^2\ &+1^{truth}k\times\lambda{coord}\times\sum_{r\in(x,y,w,h)}(truth^r-b^r_{ijk})^2\ &+\lambda_{obj}\times(IoU^k_{turth}-b^o_{ijk})^2\ &+\lambda_{class}\times\sum_{c=1}^C(truth^c-b^c_{ijk})^2 ) \end{aligned} $$
- 第一项为负样本的置信度损失,公式中$1_{\max{IoU}<Thresh}$表示最大IoU小于阈值,即负样本的边框,$λ_{noobj}$是负样本损失的权重,$b^o_{ijk}$为置信度$σ(t_o)$。
- 第二项为先验框与预测框的损失,只存在于前12800次迭代中,目的是使预测框先收敛于先验框,模型更稳定。
- 第三项为正样本的位置损失,表示筛选出的正样本,为权重。
- 后两项分别为正样本的置信度损失与类别损失,为置信度的真值。
工程技巧
多尺度训练
由于移除了全连接层,YOLOv2可以接受任意尺寸的输入图片。在训练阶段,为了使的模型对不同尺度物体的鲁棒,YOLOv2采取了多种尺度的图片作为训练的输入。
由于下采样率为32,为了满足整除的需求,YOLO v2选取的输入尺度集合为{320,352,384,...,608},这样训练出的模型可以预测多个尺度的物体。并且,输入图片的尺度越大则精度越高,尺度越低则速度越快,因此YOLO v2多尺度训练出的模型可以适应多种不同的场景要求。
YOLOv3 (2018)
YOLO v3将当今一些较好的检测思想融入到了YOLO中,在保持速度优势的前提下,进一步提升了检测精度,尤其是对小物体的检测能力。
新网络结构DarkNet-53
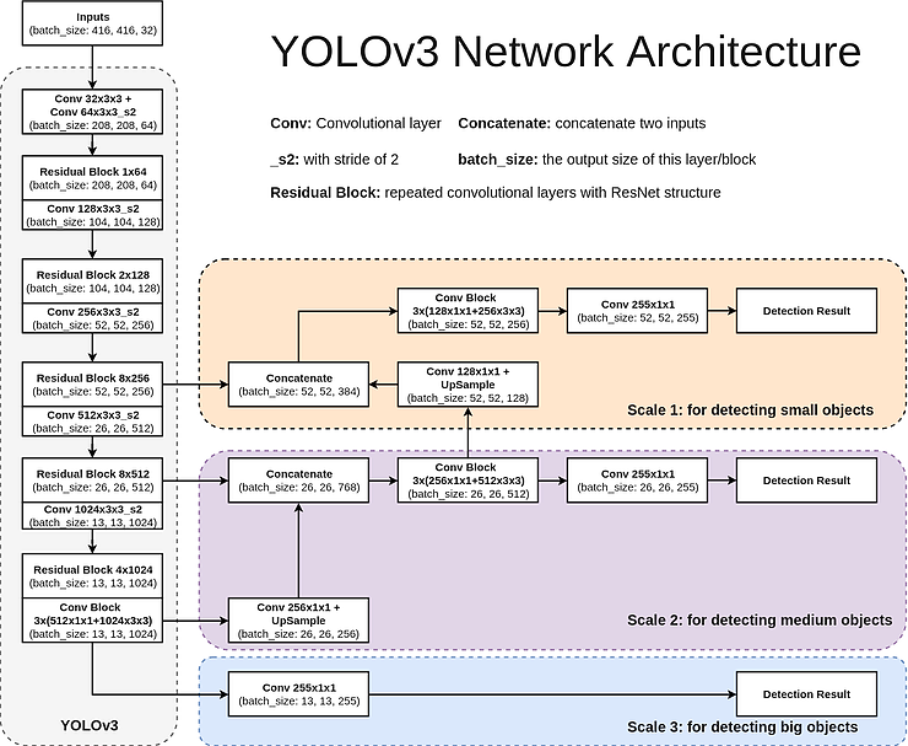
多尺度预测
从图中可以看到,YOLO v3输出了3个大小不同的特征图,从上到下分别对应深层、中层与浅层的特征。深层的特征图尺寸小,感受野大,有利于检测大尺度物体,而浅层的特征图则与之相反,更便于检测小尺度物体,这一点类似于FPN结构。
Softmax改为Logistic
YOLO v3的另一个改进是使用了Logistic函数代替Softmax函数,以处理类别的预测得分。原因在于,Softmax函数输出的多个类别预测之间会相互抑制,只能预测出一个类别,而Logistic分类器相互独立,可以实现多类别的预测。
实验证明,Softmax可以被多个独立的Logistic分类器取代,并且准确率不会下降,这样的设计可以实现物体的多标签分类,例如一个物体如果是Women时,同时也属于Person这个类别。
作者:孙泽飞
